

티스토리 뷰
구동체 HW 사양


J21이 GPIO핀을 가리킴. 삼각형모양부터 1번핀
https://www.jetsonhacks.com/nvidia-jetson-tx2-j21-header-pinout/
NVIDIA Jetson TX2 J21 Header Pinout - JetsonHacks
JetsonHacks is a site devoted to developing on the NVIDIA Jetson Development Kits.
www.jetsonhacks.com
이 사이트에 가면 핀의 역할을 자세하게 알 수 있다.
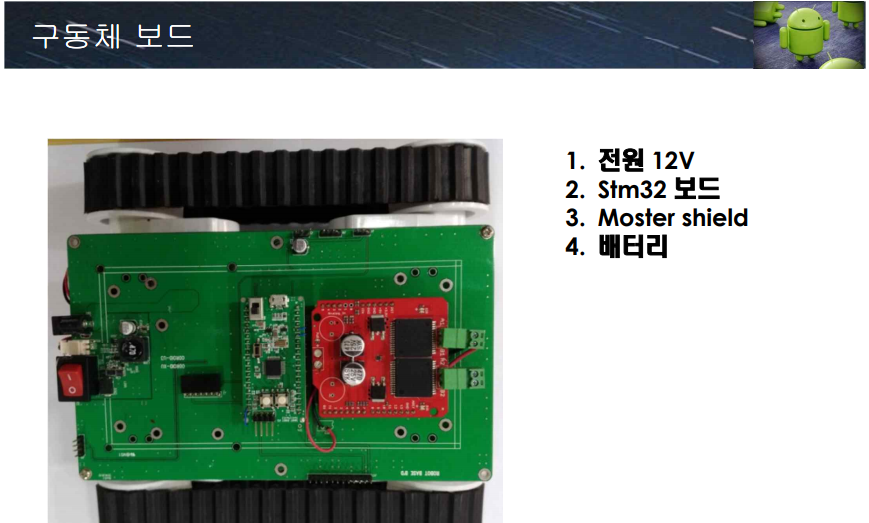
bms에서는 4.2v를 막고있기 때문에 4개를 병렬로 구성하여 16.8v가 되게 구성한다.
4S1P(4개를 시리얼로 1개 구성)
모터쉴드를 달면 아두이노 스타일로 구동 가능하다.
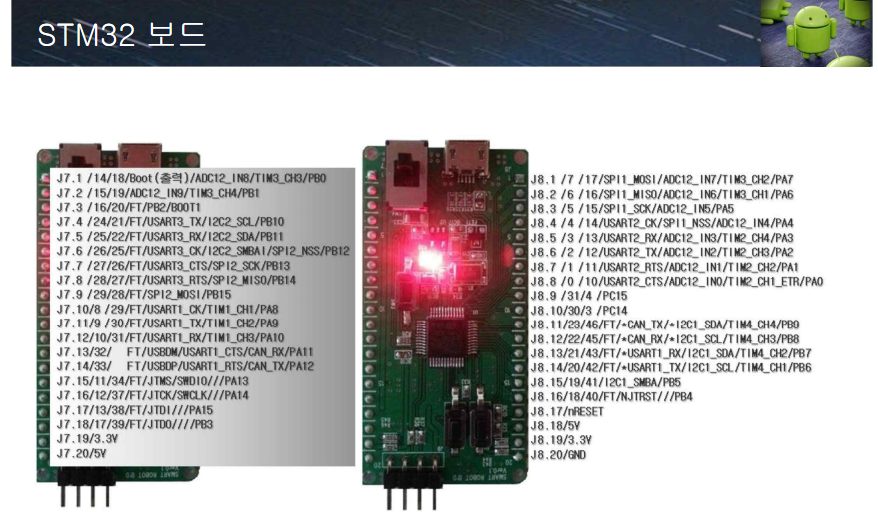
STM32F103CBTC

현재 2020.06.25 12900원에 판매중.
여기에 대한 문서를 찾아보면 (Example code 등이 오픈되어있다.) 쉽게 사용할 수 있다.

직렬로 배터리를 연결 ( 전압을 높임 .//병렬은 전압이아닌 전류를 높임 )
PCM보호회로가 과충전, 과방전, 과전류를 방지함.
하나가지고는 부족할 것 같아서. 한개 더 사용. 5200mAH로 모터, TX2보드 모두 괜찮게 구동 될 거같아서 두세트 사용

스위칭소자는 각각 T1 T2 T3 T4에 있고, 이 것들을 적절히 조정하여 모터를 구동시킴.
속도변화와 방향은 pwm형태의 신호로 최종적으로 조절해서 구현한다.
전류가 CW방향으로 돌면, 시계방향으로 모터가 돌아간다.
전류가 CCW방향으로 돌면, 반시계방향으로 모터가 돌아간다.
이렇게 회로를 구성해 놓은것이 모터드라이브 (모터쉴드) 이다.
아래가 자세한 회로도


'Project' 카테고리의 다른 글
| JETSON TX2 기반 물체 추적 자율주행 RC카 - 시연영상 - (0) | 2020.06.30 |
|---|